Associate Professor of Urology Johns Hopkins University
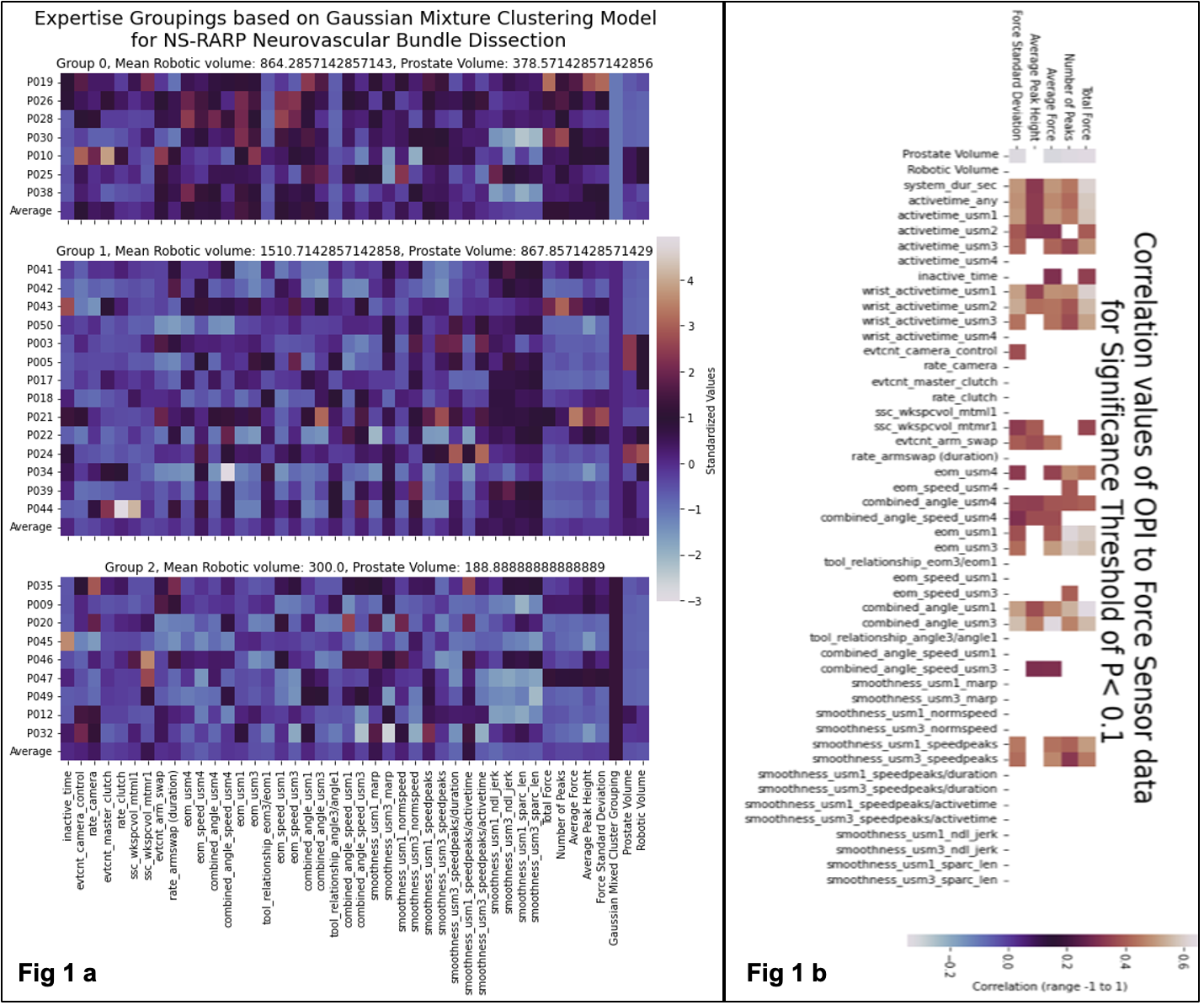
Introduction: Erectile dysfunction after nerve-sparing robot-assisted radical prostatectomy (NS-RARP) ranges from 8% to 49% even by high-volume surgeons with no consensus on granular tasks that result in the best potency. Studies found robotic kinematic data to correlate with select RARP clinical outcomes. We analyzed Objective Performance Indicators (OPIs) from a mastery registry of high-volume urologists performing a NS-RARP simulation to identify which metrics can predict operative expertise. Methods: Thirty urologists (avg. RARP volume = 734) performed a NS-RARP on a validated, realistic, hydrogel model with force sensors embedded in the neurovascular bundle (NVB). Robotic kinematic (51 OPIs) and force (number of force peaks, variability, average and total force) data were collected. These OPIs were mapped to broader technical skill categories and used to build logistic regression classifiers that predict the probability of case volume and force data. Data was fit to a Gaussian Mixture model, then separated based on OPIs. Tukey’s HSD test was used to determine significance in inter-group comparisons of overall robotic, RARP volume and force metrics Results: Urologists were clustered into 3 groups based on mean total Overall robotic and RARP volume into 7 Super-Users (SU), 14 High Volume (HV), and 9 Low Volume (LV) surgeons (Fig 1a). OPIs were categorized into 3 broad categories: robotic efficiency, tool motion, and operative fluidity. A significant difference ( <0.05) across groups was seen in 31 OPIs (18 across all 3 groups, 10 when comparing SU vs HV and HV vs LV, and 6 when comparing HV vs LV groups). Force metrics showed significant difference comparing SU and HV to LV (Fig 1a). A significant negative correlation was found between force metrics and robotic volume, RARP volume and 13 OPIs (5 robotic efficiency , 4 tool motion, and 4 operative fluidity OPIs) (Fig 1b). Conclusions: Experienced urologists demonstrated a higher incidence of operative fluidity and tool efficiency OPIs, which are also predictive of less force data applied to the NVB during the simulation. These specific actions specific to super users may improve surgical efficiencies through structured feedback. SOURCE OF Funding: None