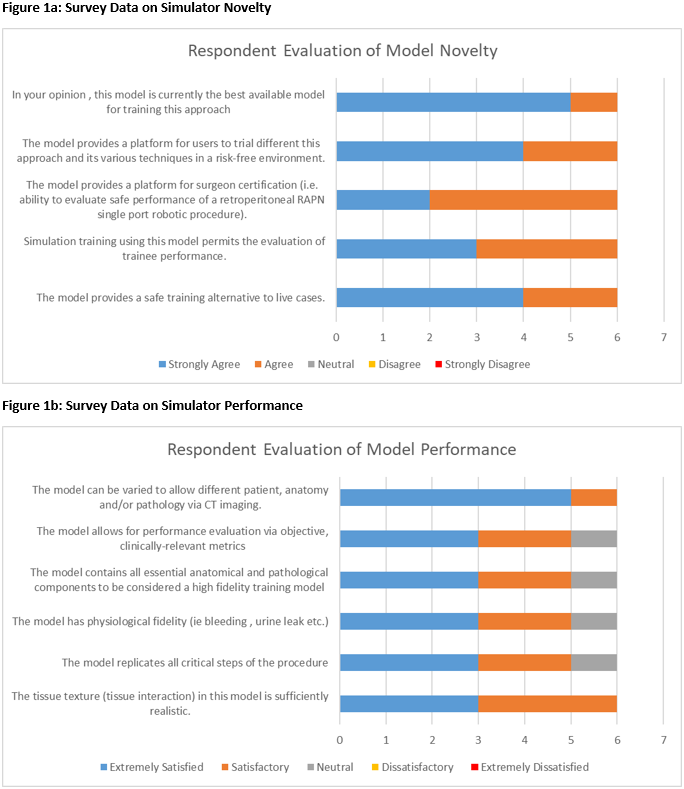
Introduction: Retroperitoneal robot assisted partial nephrectomy (RAPN) has shown restricted diffusion, limited to experienced surgeons at select institutions]. However, the recent introduction of the da Vinci single port (SP) surgical platform for RAPN with its slender profile is ideal for navigating narrow spaces. We have previously developed and validated a realistic, perfused hydrogel platform for transperitoneal RAPN robotic surgery as an adequate training tool. Our objective was to develop a similar platform using the same methodology. Methods: A contoured box was designed to replicate the intraabdominal space surrounding the kidney, emphasizing realistic responses to initial incisions, balloon dilatation, and robot docking, then subsequently 3D printed. Patient-specific renal tissue phantoms and supporting structures were created using previously validated methods. Previous work with tensile testing on PVA hydrogels validated their ability to mimic the physical properties of renal tissue. The phantom was wrapped in a simulated Gerota’s Fascia, attached to a PVA “muscle” sheet, and connected to a hydrogel AA and IVC. The completed model was fixed to the inner contour of the 3D printed body cavity section, which was then covered with a hydrogel abdominal wall with a simulated peritoneal pouch, containing simulated bowels. Experts at the University of Rochester, Cleveland clinic and Henry ford hospitals tested the model during scheduled simulation events. 6 experts with >50 case experience in Single port robotic surgery and >1000 multiport robotic cases completed a survey to evaluate the realism and educational effectiveness of this model. Results: Respondents completed surveys on the novelty and effectiveness of the platform. Agreement on simulator novelty was unanimously positive (100% agree or better) (Figure 1a). Performance evaluations reached a minimum of 80% agreement for all categories, with 100% of feedback rated as neutral or better. (Figure 1b). Conclusions: This realistic simulation procedural platform for robot assisted single port retroperitoneal renal surgery provides a suitable training medium for training and experienced urologists to improve the skills required to adopt this approach. SOURCE OF Funding: none