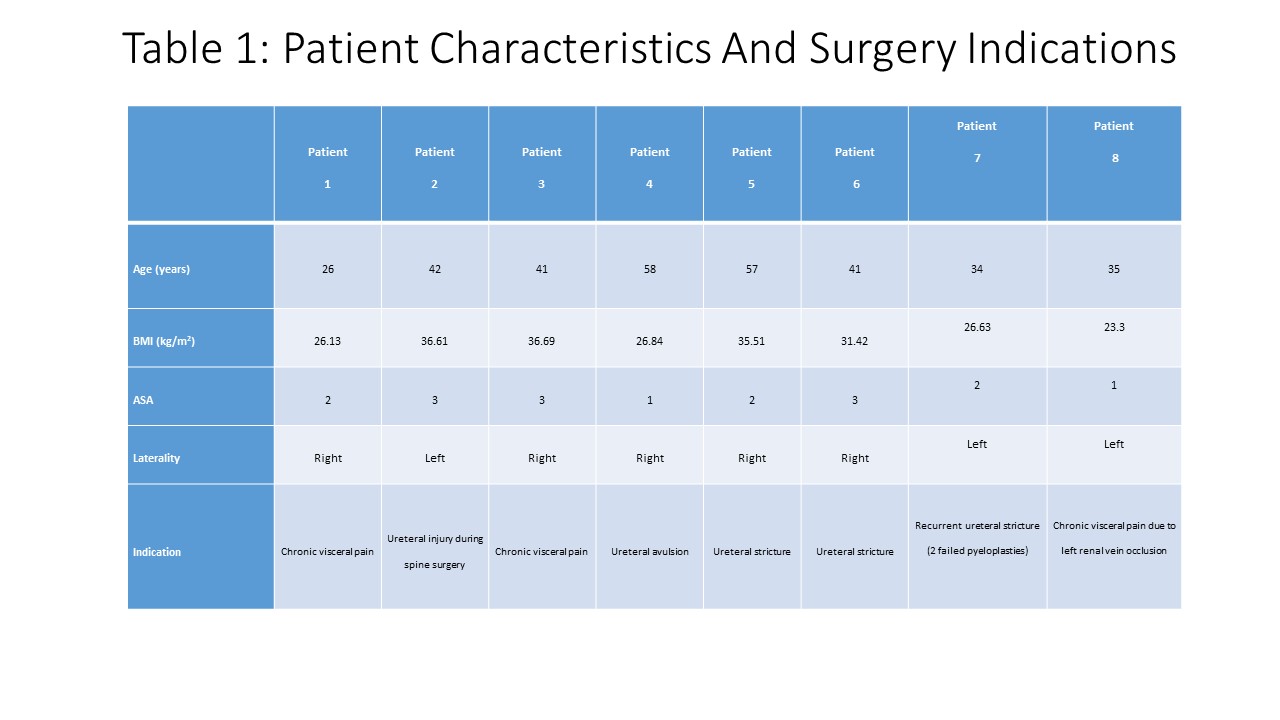
Introduction: We aim to demonstrate the feasibility and safety of the novel minimally invasive technique for efficient, multiquadrant robotic kidney transplantation using da Vinci single-port robot platform (SP-KAT). The study patient had a good split renal function and complete ureter avulsion. Methods: Eight consecutive patients underwent SP KAT using the DaVinci SP platform. Overall patient clinicopathologic variables were recorded in Table 1. We demonstrate our technique in 58 year old male that presented after complete avulsion of the ureter during ureteroscopy. He had good split renal function on imaging. Technical steps of the surgery included (1). Robotic nephrectomy; (2) Kidney benching; (3) Dissection of Iliac vessels and Kidney placement; (4) Vascular anastomosis; (5) Ureteral reimplant. Extra corporeal kidney benching performed at the same time while the iliac vessels are being exposed robotically for subsequent transplant. This patient in addition required Boari flap ureteroneocystostomy due to insufficient length of ureter. Results: All SP KAT cases were successfully performed without repositioning or conversion to open. Total operative time was 701 minutes. Estimated blood loss was 500cc. The Foley and stent removed at 2 and 6 weeks postoperatively. Patient had complete preservation of renal function. No documented postoperative complications up to latest follow up at 1 year. Conclusions: We demonstrate our single-port efficient, multiquadrant robotic kidney transplantation technique performed though a single incision further reducing surgical morbidity. All the cases were completed successfully without conversion or loss of graft function. SOURCE OF Funding: None