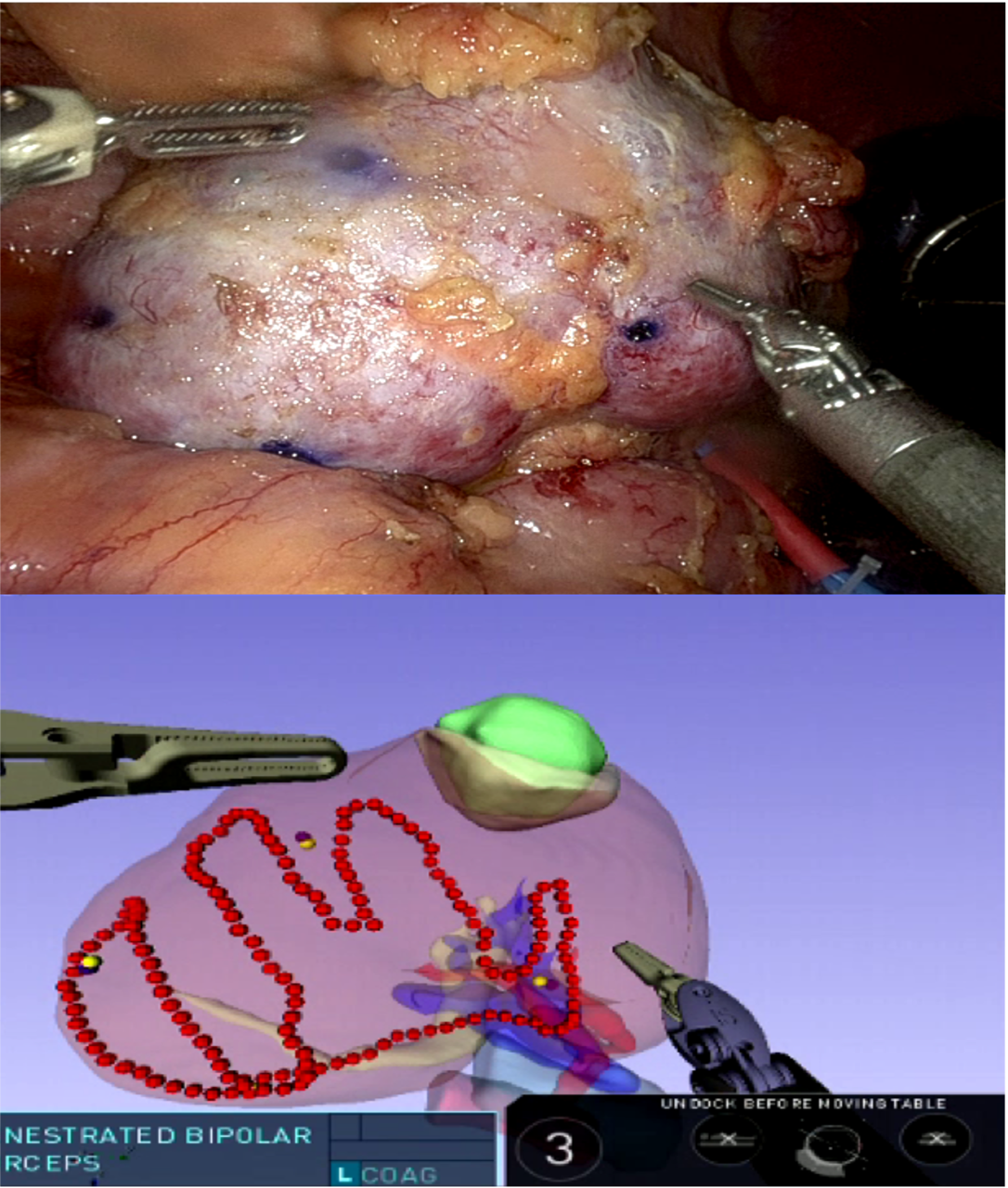
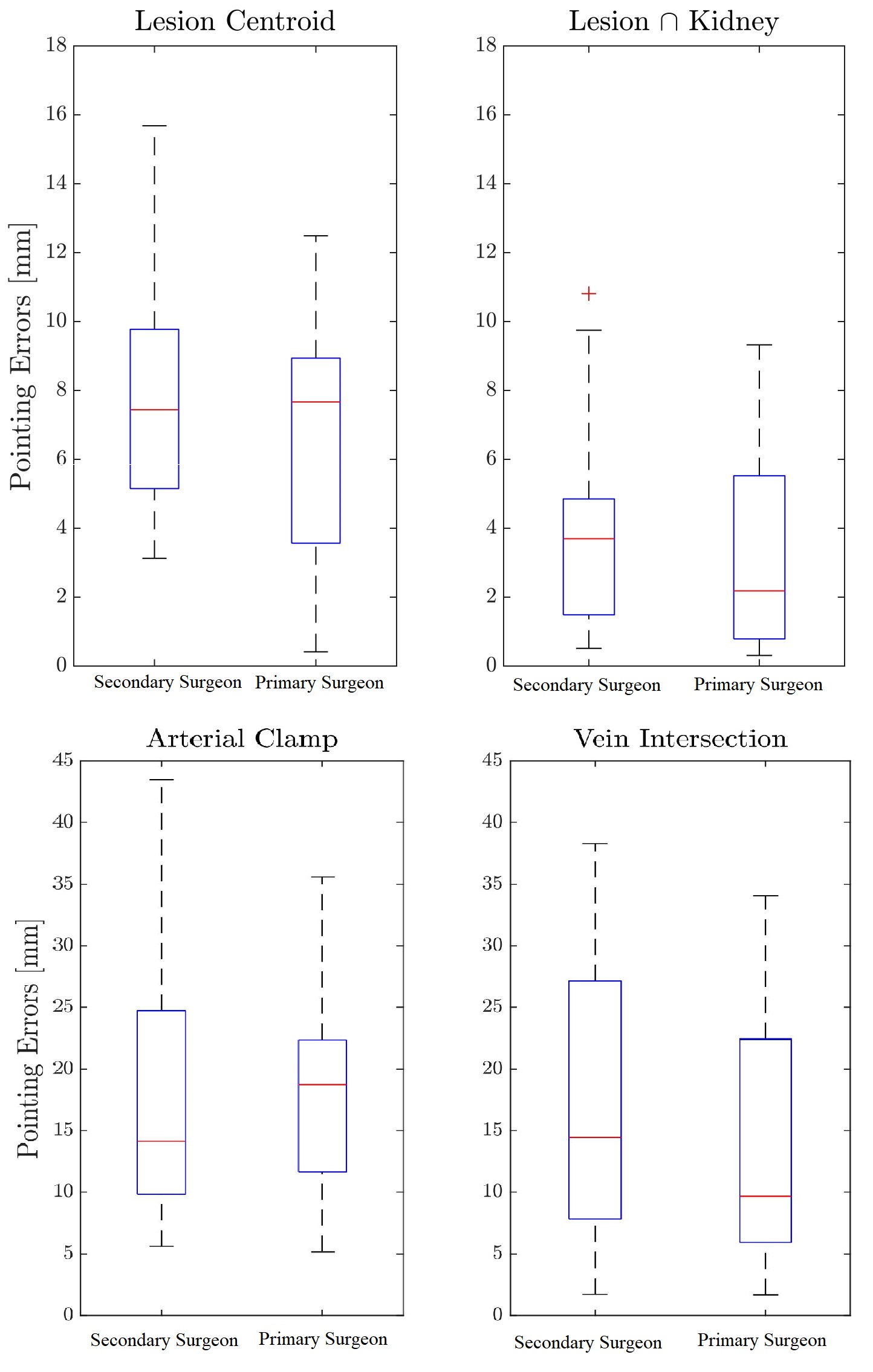
Introduction: Image-guidance during robotic partial nephrectomy (rPN) employs a 3D model of renal anatomy to allow for sub-surface identification of structures. Most image guidance surgery (IGS) systems involve manual registration, which is inaccurate and requires a separate individual to align the model intraoperatively. We sought to evaluate an automated, touch-based 3D IGS system and its accuracy compared to expert surgeons. Methods: We identified patients with renal masses with planned rPN. Preop CT scans were used to generate virtual patient-specific 3D anatomical kidney models. Our IGS system was deployed during 6 rPNs by two primary surgeons. Registration was achieved by aligning a touch-based point cloud of the kidney surface tracing (using the robotic tool tip) to the models. The primary surgeon used the tool tip to estimate the location of the renal artery, vein, tumor centroid and intersection of the mass with parenchyma. After registration, a secondary surgeon (blinded to preop imaging) used the tool tip to record the location of these structures with the IGS system. The ground-truth, intraoperative locations of the target structures were recorded after dissection was complete. Target registration errors (TRE) with and without IGS were compared. Results: Computed registration was performed successfully across 6 patients (mean axial diameter 3.0 cm, mean nephrometry score 6.5, Fig 1). After surface tracing, registration on average took 100 seconds. Median overall TRE for the secondary surgeon using the IGS compared to the primary surgeon was 9.8 vs 8.6 mm, respectively (p = 0.25). TRE of localization was less for the lesion intersection with kidney (3.7 vs 2.2 mm, p = 0.43) compared to the renal artery (14.1 vs 18.7 mm, p = 0.61) and vein (14.4 vs 9.6 mm, p = 0.06 )(Fig 2). Conclusions: We report an automated, touch-based IGS system for rPN. The system is as accurate as an expert surgeon in target structure identification, though accuracy of registration for rigid structures was better than that of hilar vessels. Further improvements are needed to accurately model tissue deformation especially for hilar anatomy. SOURCE OF Funding: NIH R01-EB023717 Software interface support from Intuitive.