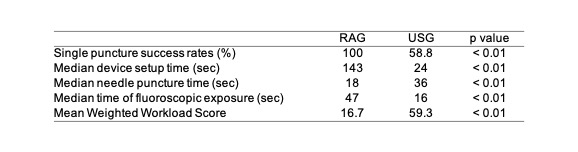
Introduction: We previously reported the efficacy of robot-assisted fluoroscopy-guided (RAG) percutaneous renal puncture for nephrolithotomy. An improved version of the robotic system with biplane fluoroscopy methods which can be used for the puncture in the spine position has been recently developed. In the current study, we compared RAG puncture with an improved robotic system version with ultrasound-guided (USG) puncture. Methods: We conducted a multicenter prospective benchtop study with a renal phantom model using an improved version of the robot system. Seventeen urologists punctured the renal phantom model from the side using RAG and USG techniques. The single puncture success rates, time from device setup to puncture, puncture time, and fluoroscopic usage time were recorded, and the surgeon’s self-assessment using the NASA-Task Load Index was conducted for the analyses. Results: The single-puncture success rates of the RAG and USG techniques were 100% and 58.8%, respectively (p < 0.01). In the RAG technique, the median device setup time was longer (143 and 24 s, p < 0.01), the median needle puncture time was shorter (18 and 36 s, p < 0.01), and the median time of fluoroscopic exposure was longer (47 and 16 s, p < 0.01) than in the USG technique. The results of the surgeon’s self-assessment showed that the mean weighted workload score was lower in the RAG technique than in the USG technique (16.7 and 59.3, p < 0.01); the mental workload was significantly smaller in the RAG technique. Conclusions: The RAG technique showed higher accuracy rates of puncture and a smaller mental workload than the USG technique for renal puncture. SOURCE OF Funding: none