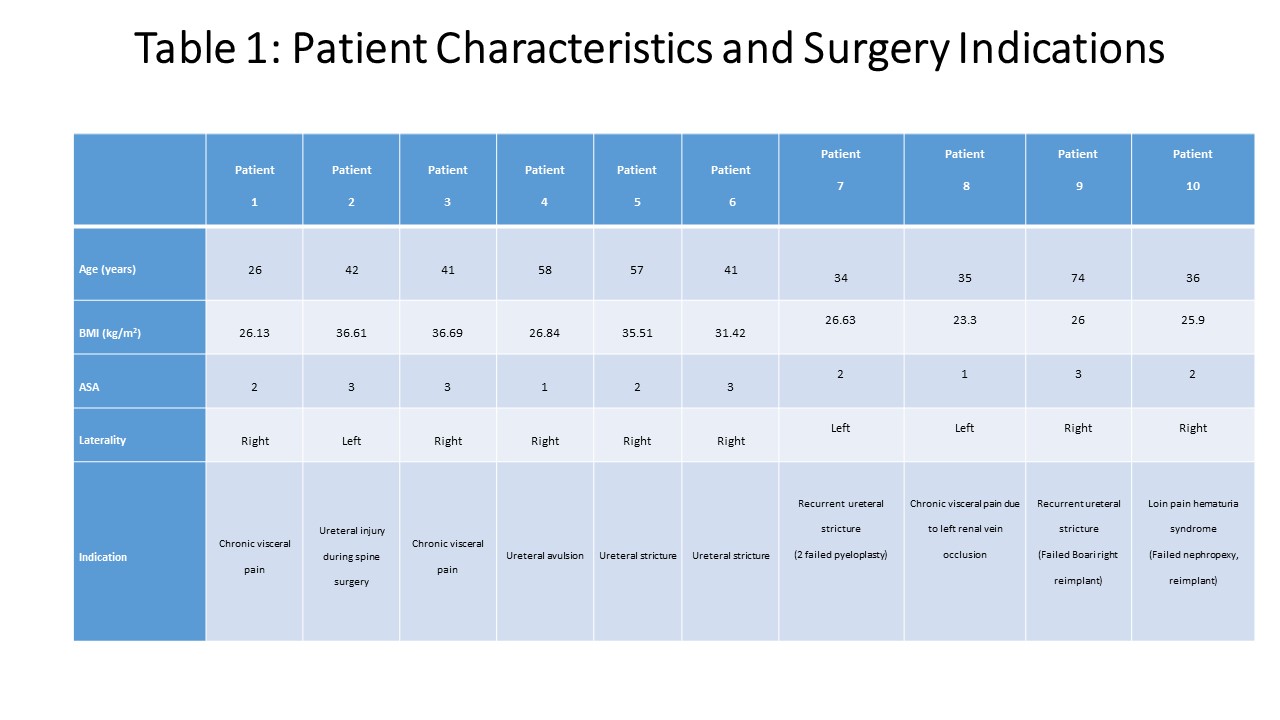
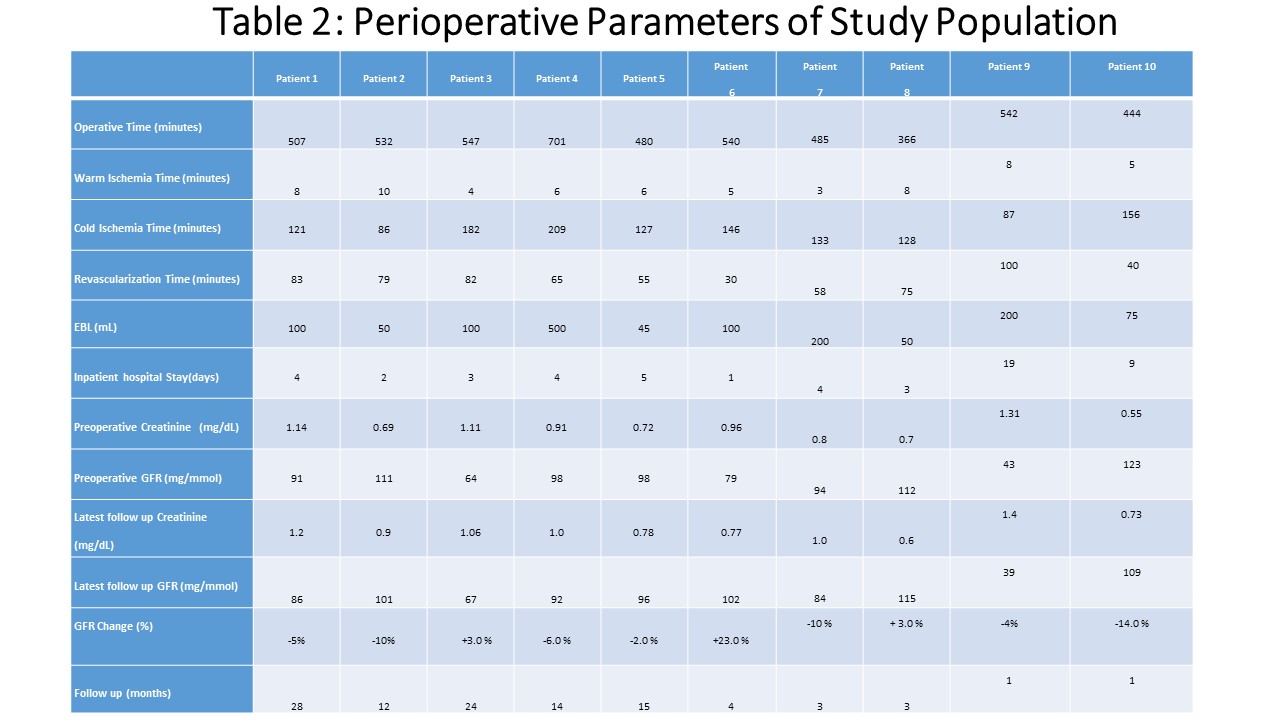
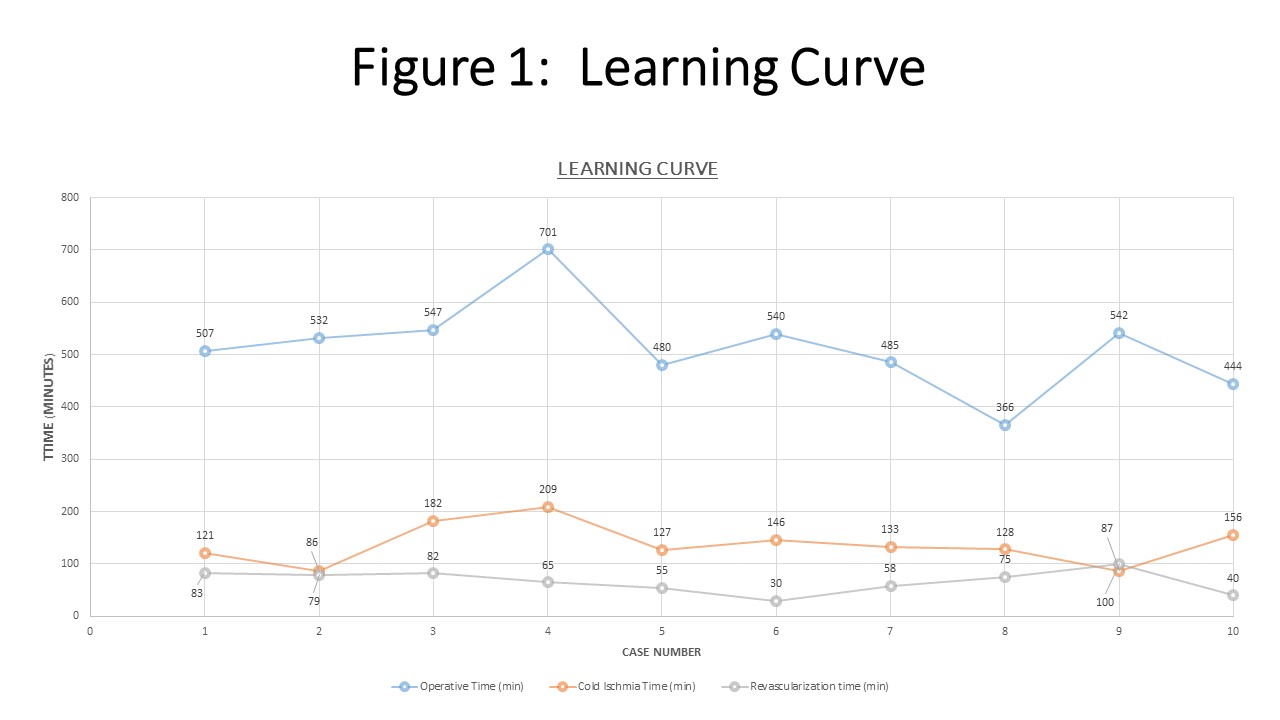
Introduction: We present our initial series of single-port (SP) robotic KAT, ideal for multi-quadrant surgeries, and aim to evaluate the feasibility and safety of the novel approach. Methods: Ten consecutive patients underwent robotic SP KAT and indications include complex or recurrent ureteral stricture, ureteral avulsion, chronic visceral pain due to multiple etiologies and failed prior surgeries. Extra corporeal kidney benching performed at the same time while the iliac vessels are being exposed robotically for subsequent transplant. Overall patient clinicopathologic variables and perioperative outcomes were recorded in tables 1, 2. Results: All SP KATs were successfully performed without repositioning or conversion to open or loss of graft function. Operative times ranged from 366 to 701 mins with a warm and cold ischemia time between 4 to 10 mins and 86 to 209 mins, respectively. Median hospital length of stay was 4 days. The learning curve in our case series was hard to evaluate given each individual patient presents a unique challenge but overall ischemia and revascularization times showed progressive improvement (Figure 1). There was one Clavien-Dindo 3 complication, an unrecognized bowel injury that required re-operation in our series. At a median of 8 months follow-up, latest postoperative GFRs were stable, ranging from +23% to -14%, and the grafts were functioning well. Notably, all patients who had preoperative chronic visceral pain had complete resolution of pain postoperatively. Conclusions: We demonstrate our single-port multi quadrant robotic kidney auto transplantation technique performed through a single incision further reducing surgical morbidity. All the cases reported improvement in flank pain and no radiological evidence of urinary obstruction on follow up. SOURCE OF Funding: None