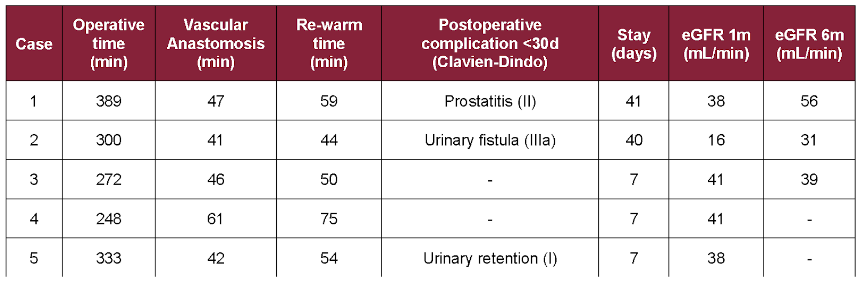
Introduction: Orthotopic kidney transplant is an alternative for patients with an end-stage renal disease non-suitable for a heterotopic kidney transplant (KT) due to severe iliac atherosclerosis or occupation of iliac fossa by previous grafts. This approach is performed through a left lumbotomy, using the splenic or renal artery, the renal vein and the native urinary tract. However, it is technically challenging and is associated with a higher rate of complications compared to conventional KT. Recently, robot-assisted kidney transplant (RAKT) has been shown to achieve excellent patient and graft outcomes, while reducing surgical morbidity. From the experience in RAKT, we have developed this technique in orthotopic transplantation. The aim of this video is to describe the technique of orthotopic robotic assisted kidney (ORAKT) step by step, and our series of cases. Methods: We present the ORAKT technique from different cases using splenic or renal artery. Some strategies to vessel dissection and preparation are also described. Results: 5 ORAKT were done: 4 cases from cadaveric donor and 1 case from living donor. 1 arterial anastomosis was performed to the renal artery, 4 to the splenic artery. Surgical and functional data are shown in table 1. 24 hour ultrasound is done in all cases, and the ureteral stent is removed at 4 week. Conclusions: ORAKT provides a minimally invasive alternative for some selected patients non-suitable for a heterotopic KT and is technically feasible in centers with robotics kidney transplant expertise. The potential advantages of the robotic approach are related to the reduction of lumbotomy morbidity, the better and precise dissection of the native renal vessels and splenic artery and the more precise vascular anastomosis. SOURCE OF Funding: None.