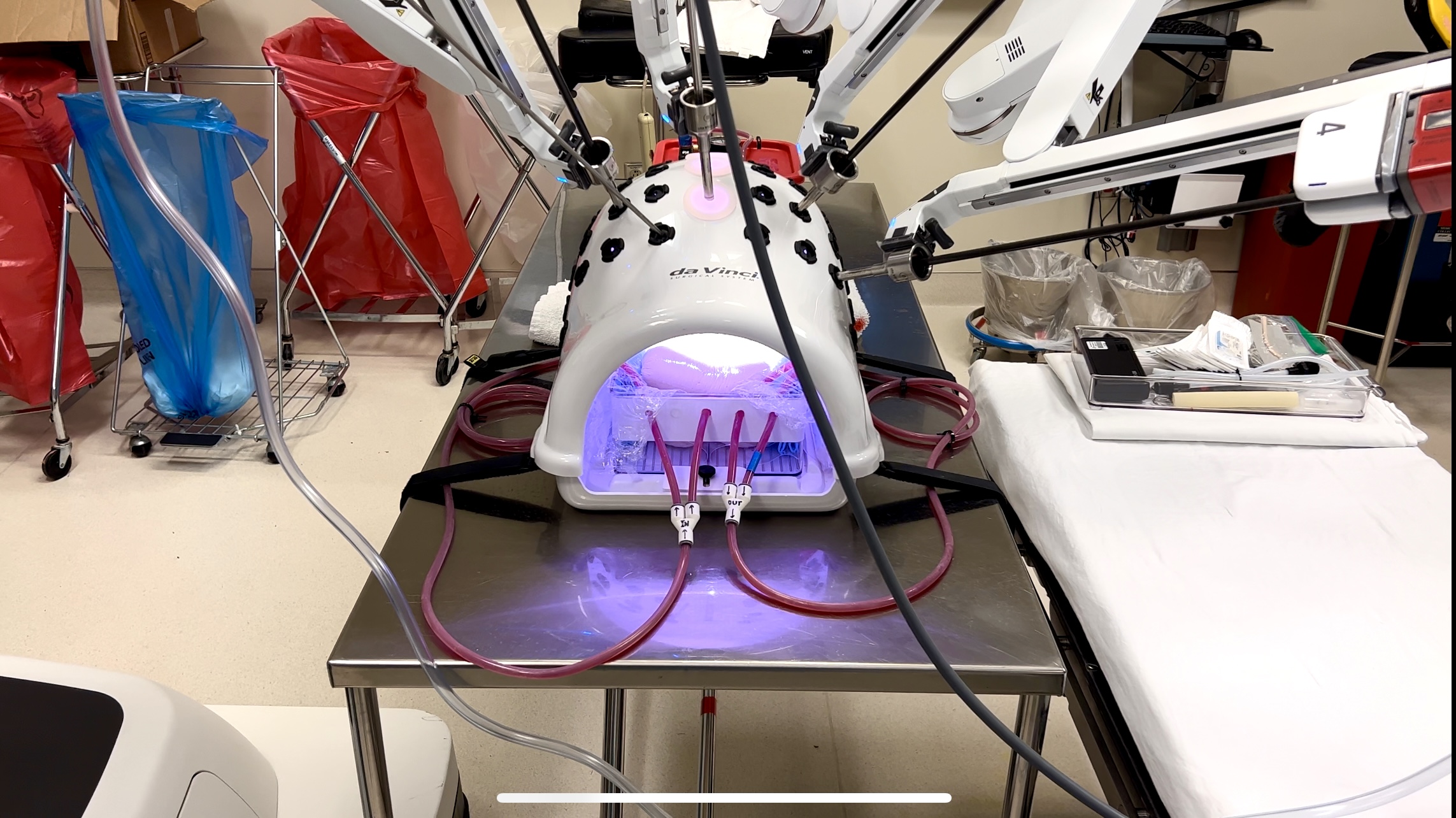
Introduction: Although encountering a major vascular injury such as the partial transection of a renal artery during robot-assisted laparoscopic nephrectomy is rare, when it does occur, the consequences can be devastating. Practice resources and fully immersive simulations are primarily virtual in nature and difficult to access. We sought to create a hands-on training simulation designed to train medical residents on the management of acute hemorrhage during robot-assisted laparoscopic nephrectomy. Methods: We placed a submersible utility pump into a receptacle containing 5L of artificial blood made from corn starch, water and red dye. The pump was then connected to a pressure gauge and flow control valve to accurately set a flow rate of 1 L/min. The artificial blood was pumped through the closed-loop system via a series of silicone tubes attached to an artificial vessel with the dimensions of an average renal artery. The artificial vessel was then placed in an artificial terrain made from flour, water, and silicone rubber to emulate the pliability of organic tissue. This apparatus was then placed in a basin that fit within the Intuitive abdominal dome trainer, allowing for the robot arms of the da Vinci surgical system to dock. Results: The machine pump was able to maintain a flow rate of 1 L/min, and the system was able to reproducibly simulate a major vascular injury without complications. The concavity of the artificial terrain allows for the pooling of blood, simulating the realistic challenge of maintaining visualization during acute hemorrhage, while the collateral flow effectively simulates back-bleeding after vascular clamping. Conclusions: Our simulation proved to be successful in simulating a realistic environment for trainees to practice their skills in managing acute hemorrhage. This simulation is not only a training tool for medical residents to practice, but also allows attending physicians to assess their trainee’s skill level and provide feedback on critical decision-making during crisis, and communication skills. SOURCE OF Funding: None