Methods: HUGO RAS System was used to perform 3 RAPNs on human cadavers. This novel robotic system has independent robotic arms that allow for a modular configuration, an open high-definition console, 3-dimension vision goggles, and easy-grip “pistol-like” controllers. We sought to describe the optimal setup configuration for this new robotic platform, and to assess technical feasibility of all the procedural steps. All components of surgical team (console surgeon, bed-side assistant and scrub nurse) received an official technical training. Patient positioning, arm cart disposition, and trocar placement were described. Docking time, operative time, and technical errors of the system were recorded, as well as intra-operative complications such as clashing of the instruments and/or injury to abdominal organs.
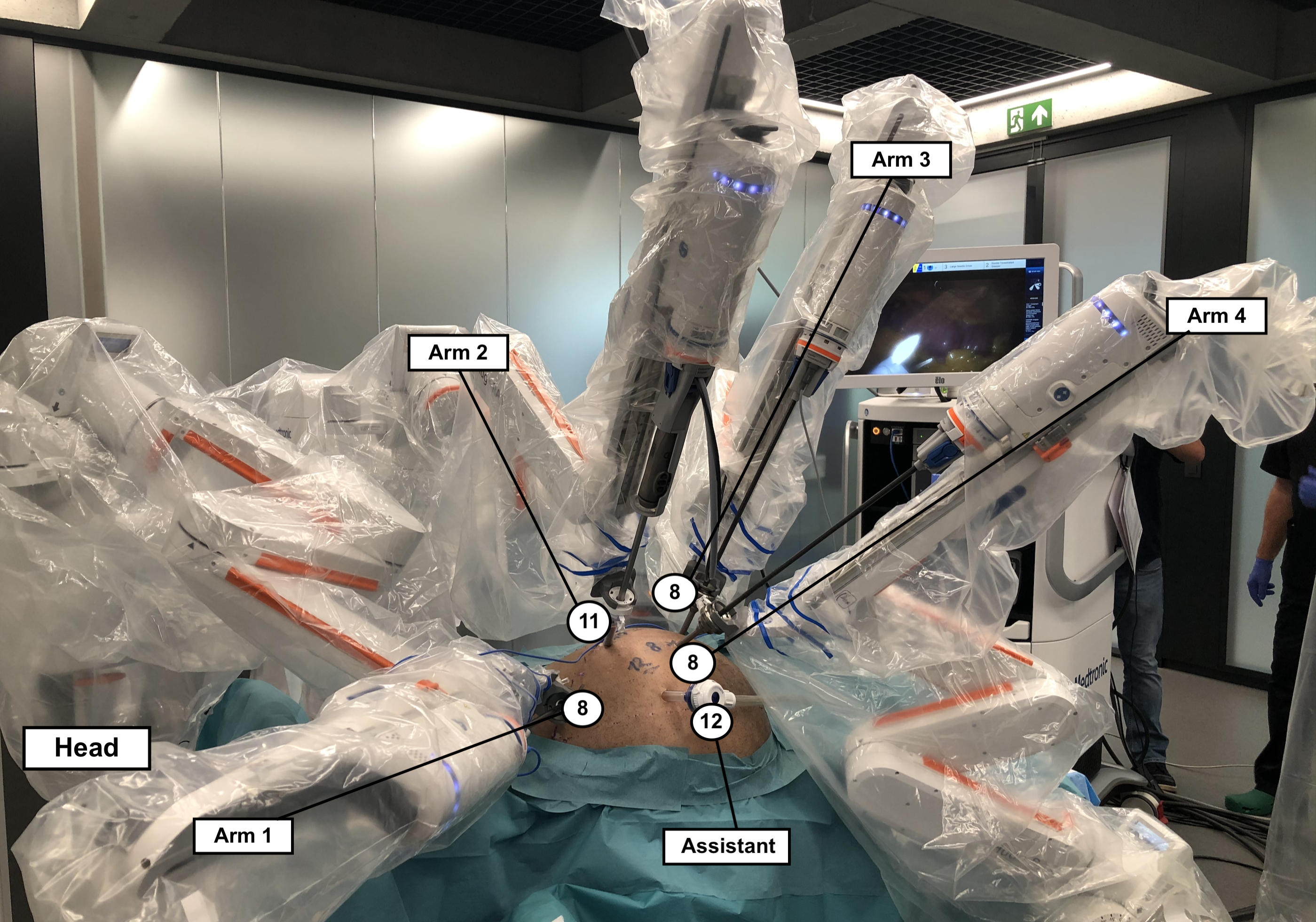
Results: Instruments consisted of monopolar scissors, forceps bipolar, and needle driver; a 0-degree camera was used. With patients on flank position, four robotic trocars (one 11-mm optic port, and three 8-mm robotic ports) were positioned in a ‘diamond’ configuration, with three arm carts behind the back of the patient, and one arm cart positioned in front of the abdomen (Figure 1). One 12-mm assistant trocar was placed on the para-rectal line. All procedures were performed trans-peritoneally, and all cases were completed following all traditional steps. Docking time ranged between 3 and 7 minutes. Mean (standard deviation) operative time was 55 (±15) minutes. No operative complications, nor technical failure by the system occurred with our setup.
Conclusions: RAPN with HUGO RAS system is feasible and safe in a pre-clinical setting. Future investigations should focus on technical standardization and optimal setting of this novel robotic platform in a clinical setting.

.jpg)
.jpg)