MP32: Surgical Technology & Simulation: Instrumentation & Technology I
MP32-02: Development of an Automated Irrigation System Synchronized with an Ultra‑miniature Fiber‑optic Pressure Sensor for Regulating Intrapelvic Pressure During Ureteroscopy: An Ex Vivo Preclinical Study
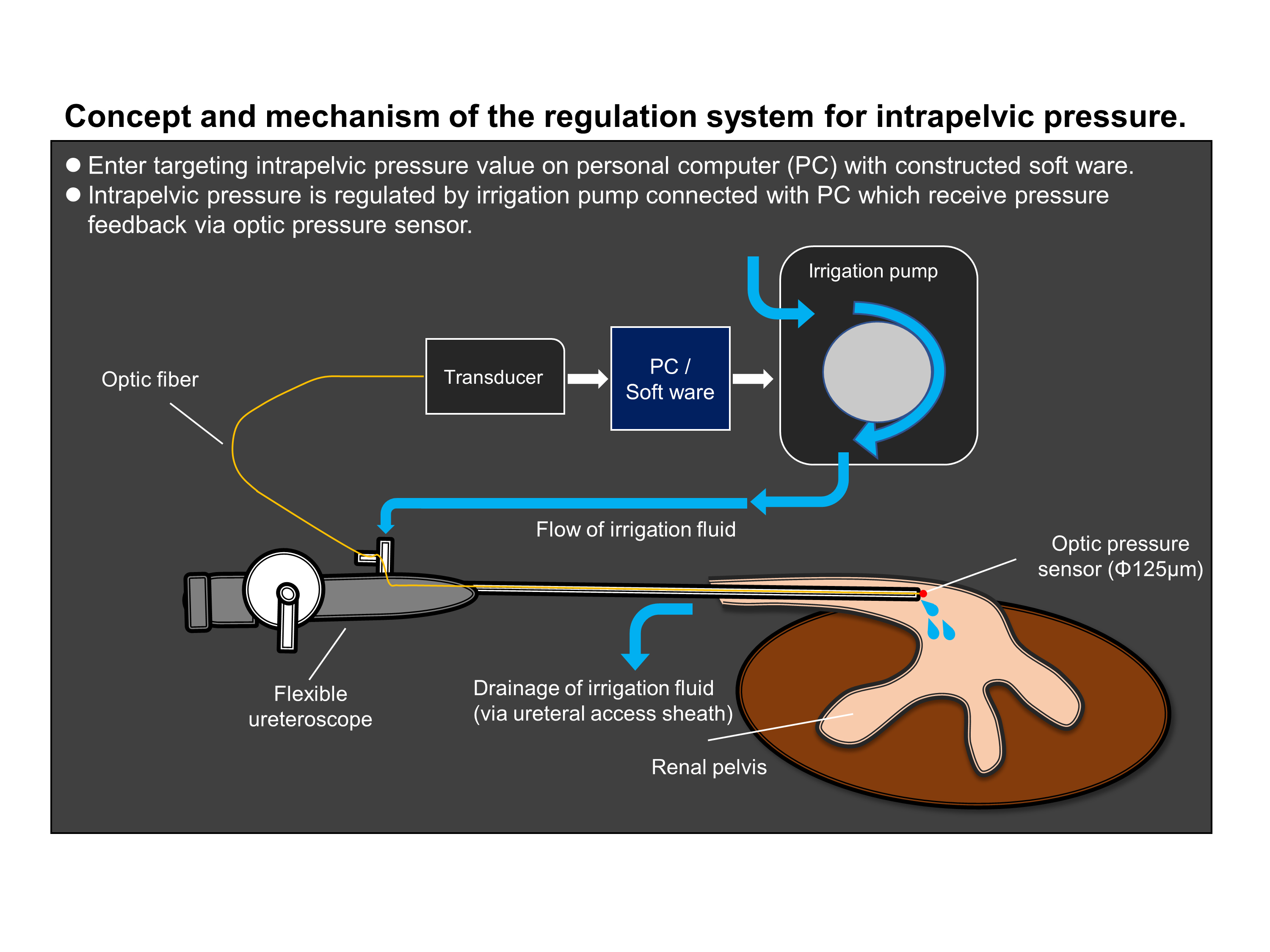
Introduction: Although irrigation flow is essential for maintaining clear visibility and a safe surgical field during flexible ureteroscopy (f-URS), increased intrapelvic pressure (IPP) can be associated with pyelovenous or pyelocaliceal backflow, leading to the risk of febrile urinary tract infection and sepsis postoperatively. This study aimed to assess the feasibility of our automated irrigation system synchronized with an ultra-miniature fiber-optic pressure sensor for regulating IPP in the preclinical setting.
Methods: A fresh cadaveric porcine kidney was used. A 6Fr nephrostomy catheter attached to a pressure transducer and the tip of the 10/12Fr ureteral access sheath (UAS) were placed on the renal pelvis of this model. A fiber-optic pressure sensor, which consisted of a diaphragm pressure sensor (F250 µm) and a 2-m optic fiber (F140 µm), was set in the working channel of a ureteroscope. The correlation of measured IPP between the fiber-optic pressure sensor and the pressure transducer was assessed. Further, we investigated whether an automatic system could accurately regulate IPP during f-URS.
Results: High correlations between the two sensors at each irrigation pressure value (60, 100, 120, and 180 mbar) were observed (all, r = >0.7, p < 0.001), likewise when performing bolus irrigation (r = 0.98, 95% CI 0.97-0.98, p < 0.001). When changing the IPP set value from 5 to 20 mmHg or 20 to 5 mmHg, this automated irrigation system smoothly regulated IPP without overshooting. During the f-URS procedure, although a great change in pressure was observed after insertion or removal of the ureteroscope in the UAS, IPP was immediately and accurately regulated by this system when reaching the renal pelvis.
Conclusions: We developed a new automated irrigation system using an ultra-miniature fiber-optic pressure sensor for controlling IPP during ureteroscopy. This system was a prototype for preclinical use; however, it was feasible and facilitated safety optimization via IPP regulation during f-URS.

.jpg)
.jpg)