MP41: Surgical Technology & Simulation: Training & Skills Assessment
MP41-02: Novel Robotic-Assisted Electromagnetic Guidance for Precision Percutaneous Access: A Cadaveric Study of Novices Versus an Expert
Sunday, May 15, 2022
10:30 AM – 11:45 AM
Location: Room 228
Mitchell Humphreys*, Kevin Wymer, Phoenix, AZ, Ben Chew, Vancouver, Canada, Janet Zhen, Redwood City, CA, Fuad Elkhoury, Los Angelas, CA, Sri Sivalingam, Cleveland, OH, Matthew Dunn, Santa Monica, CA, Michael Borofsky, Minneapolis, MN
Introduction: A precise puncture into the exact location in the renal collecting system is an essential skill for successful percutaneous nephrolithotomy (PCNL). The consequences of a suboptimal puncture and tract dilation can result in bleeding or the inability to treat stone burden efficiently or completely. This proficiency is developed over time and can be challenge for novices. The purpose of this study was to determine if a novel technology, robotic-assisted electromagnetic (EM) guidance, can impact the success of percutaneous renal access in a cadaveric model.
Methods: Seven novices (individuals who use IR for access, or gain percutaneous access <24 times/year, or have gained access <30 times after training) used robotic-assisted EM guidance provided by the Monarch® Platform, Urology (Auris Health, Inc., Redwood City, CA) to obtain upper pole, mid kidney, and lower pole access in the supine position vs. the same tasks in a prone position using fluoroscopy in a cadaveric model. Measured variables were time to access, number of needle passes, fluoroscopy time and dosage, and the accuracy of access (location of the puncture). The novices were benchmarked against an expert (>100 lifetime PCNLs including access) to contextualize the influence of the technology. Statistical comparisons were made using paired t-tests.
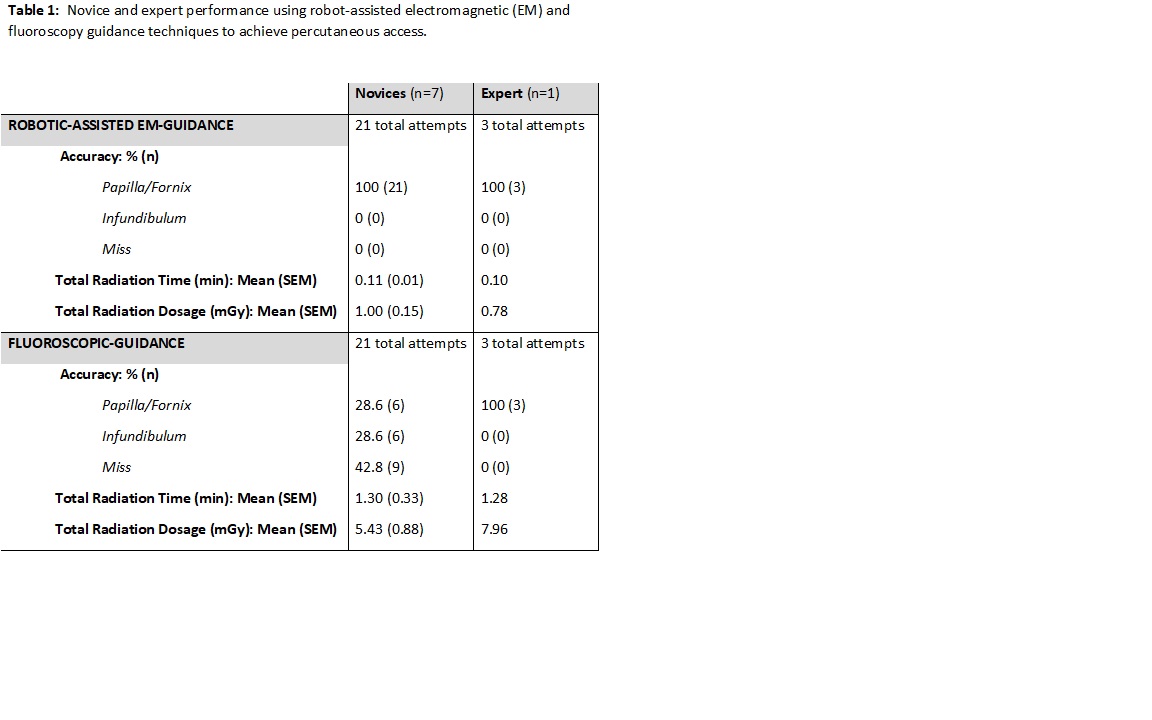
Results: Successful access by the novices and expert was achieved in 100% of cases using robot-assisted EM guidance in supine position, but only in 57% and 100% of cases, respectively, when using fluoroscopy in the prone position (Table 1). Time to access using fluoroscopy was 16.9 min vs 6.9 min (p < 0.05) using EM guidance for the novices, compared to <4 min with both methods by the expert. Mean number of needle insertions for the novices was 1.2 vs 3.0 (p < 0.05) with EM and fluoroscopy methods, and 1.0 vs 1.7 for the expert, respectively.
Conclusions: Robotic-assisted EM-guidance in the supine position offered a significant advantage to novices. It facilitated quicker and more accurate access to the renal collecting system with fewer attempts. These initial data suggest a potential to democratize the skill of gaining percutaneous access. Additional validation is needed to confirm the value of this tool to the surgeon’s armamentarium.

.jpg)
.jpg)