Introduction: Our objective is to evaluate a novel algorithm to assist with renal calyx access planning for percutaneous nephrolithotomy (PCNL).
Methods: An optimization algorithm was developed that determines the optimal skin access and trajectory to calyx/stone for PCNL procedures. The algorithm generated renal access takes into consideration the patient-specific organs, location and size of the stone, calyceal anatomy, access length from the skin to calyx and the trajectory to the ureteropelvic junction (UPJ). To validate the algorithm, 4 urologists and 4 radiologists were asked to provide their preferred access for 15 PCNL procedures based on the diagnostic CT images, and then score the algorithm proposed renal access using a rating scale as 1 (unacceptable), 2 (acceptable and as good as an expert solution) or 3 (better than expert solution).
Results: The optimization algorithm solution was rated by experienced experts to be just as good or better than the preferred renal access in 92% of cases, giving an average rating of 2.6 out of 3 (between acceptable and better than expert solution). The average difference between the stone/calyx access point when comparing the expert and algorithm was 1.1cm (std=0.8cm) in the medio-lateral direction, 1.3cm (std=0.5cm) in the anterio-posterior direction, and 2.8cm (std=1.6cm) in the cranio-caudal direction. The distance between the percutaneous access was 2.8cm (s=1.7cm) in the medio-lateral direction, 2.3cm (std=1.6cm) in the anterio-posterior direction, and 6.6cm (std=3.2cm) in the cranio-caudal direction. Experts had an average tract length of 83.7mm, compared to 87.9mm by the algorithm and angle of insertion to the ureteropelvic junction of 151.3deg to 152.3deg, respectively. There was no significant difference between the experts and algorithm in these findings (p>0.5).
Conclusions: Initial evaluation yielded good performance of the algorithm in specifying a skin access site and trajectory into the calyx when planning a PCNL. The algorithm offers a valuable optimization tool for preoperative surgical planning and verification, and potential resident training tool.
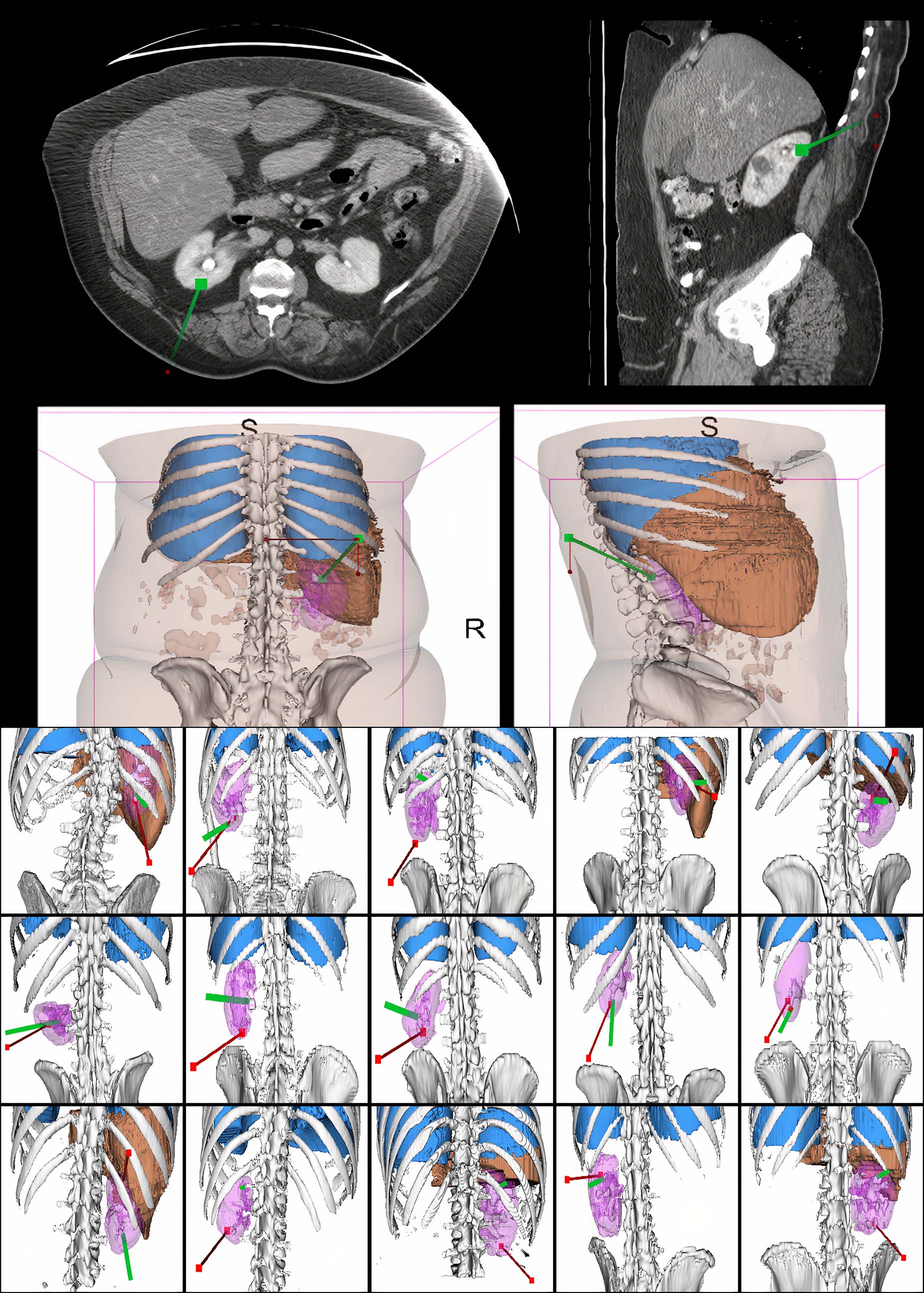
Figure Caption: (top) Surgical plan, green line shows the algorithm output. (bottom) Red line is the solution provided by the algorithm and green line is a representative expert solution.

.jpg)
.jpg)